Support Articles
Control a Rover with Foxglove
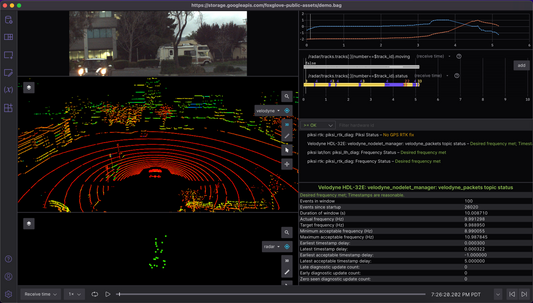
Foxglove is our favorite tool for developing software for mobile robots. Foxglove allows you to view data coming from you robot, similar to rviz, but it is cross platform and...
Control a Rover with Foxglove
Foxglove is our favorite tool for developing software for mobile robots. Foxglove allows you to view data coming from you robot, similar to rviz, but it is cross platform and...

How to add a power button and charge port to th...
One of our most asked requests is for a power button and charge port to be added to the Rover Zero 2 so that you don't have to open the...
How to add a power button and charge port to th...
One of our most asked requests is for a power button and charge port to be added to the Rover Zero 2 so that you don't have to open the...
Adding an IMU to your robot
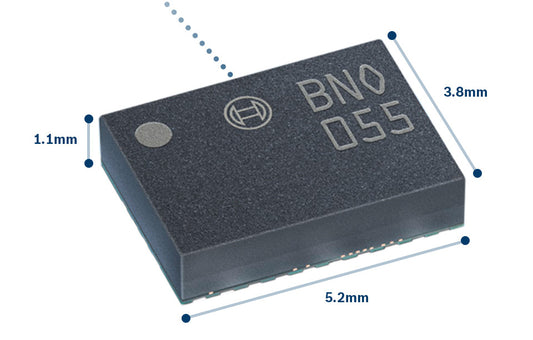
Summary: This guide walks you through how to add an IMU to your robot in order to improve the accuracy of your /odom to /base_link transform. There are many different IMUs you...
Adding an IMU to your robot
Summary: This guide walks you through how to add an IMU to your robot in order to improve the accuracy of your /odom to /base_link transform. There are many different IMUs you...