Support Articles
Fusing IMU + Encoders data using ROS Robot Loca...
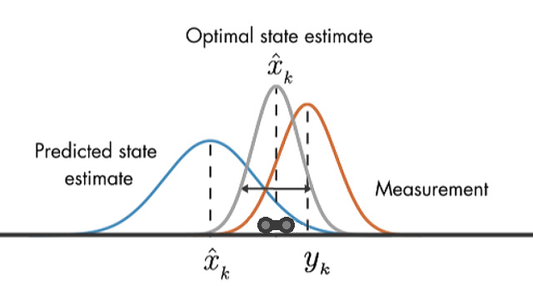
Summary: This document walks you through how to fuse IMU data with wheel encoder data of a Rover Pro using the robot_localization ROS package. This is useful to make the /odom...
Fusing IMU + Encoders data using ROS Robot Loca...
Summary: This document walks you through how to fuse IMU data with wheel encoder data of a Rover Pro using the robot_localization ROS package. This is useful to make the /odom...
Designing your own payload
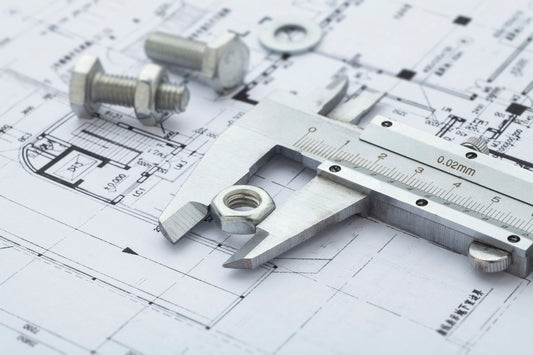
Example CAD file that has all the correct spacing and alignment The Open Rover has eight M5 mounting holes on its top for payload attachments. Its recommended that all payloads use at...
Designing your own payload
Example CAD file that has all the correct spacing and alignment The Open Rover has eight M5 mounting holes on its top for payload attachments. Its recommended that all payloads use at...
Rover Pro UART Protocol
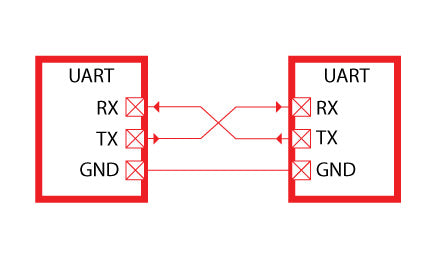
This document defines how to communicate with the robot on the lowest level. This protocol is used by our native ROS, Python, C++ and C# drivers to abstract this communication away. ...
Rover Pro UART Protocol
This document defines how to communicate with the robot on the lowest level. This protocol is used by our native ROS, Python, C++ and C# drivers to abstract this communication away. ...