Keeping your robot up to date
The Rover Pro firmware is open source and can be found on github here:
https://github.com/RoverRobotics/roverpro-firmware
Releases for the firmware are also located on github and can be found here:
https://github.com/RoverRobotics/roverpro-firmware/releases
[estimated time 30minutes]
Step #1
Download the latest firmware from github here
Step #2
WITHOUT CONNECTION TO THE ROBOT:
Connect Pickit3 to Interface Board V3 where pin 1 on Pickit is plugged into Pin 1 on the interface board
Step #3
Download and open MPlab 8.92 on any windows machine
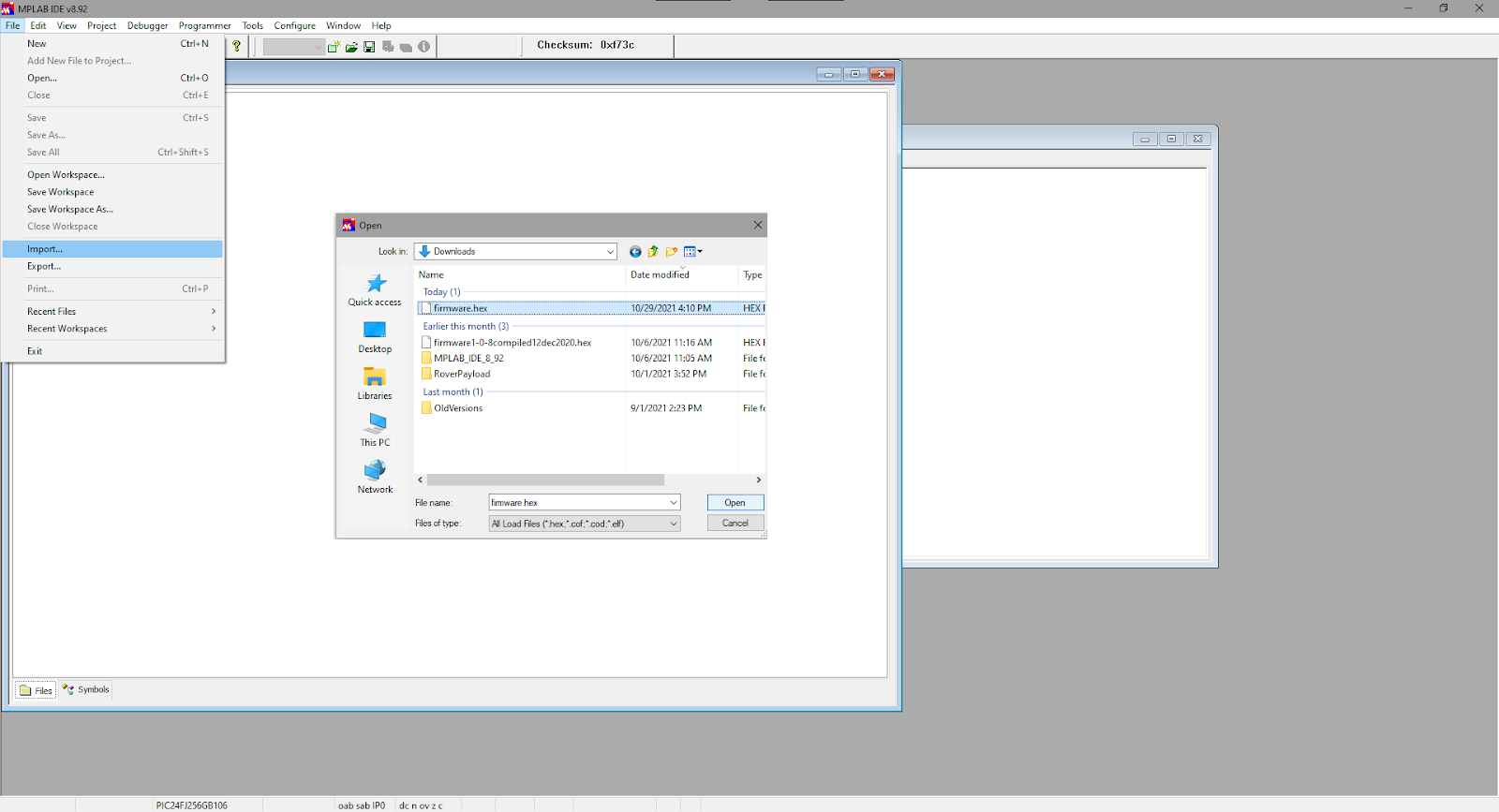
Step #4
Select File>Import and open the .hex file downloaded in step 1
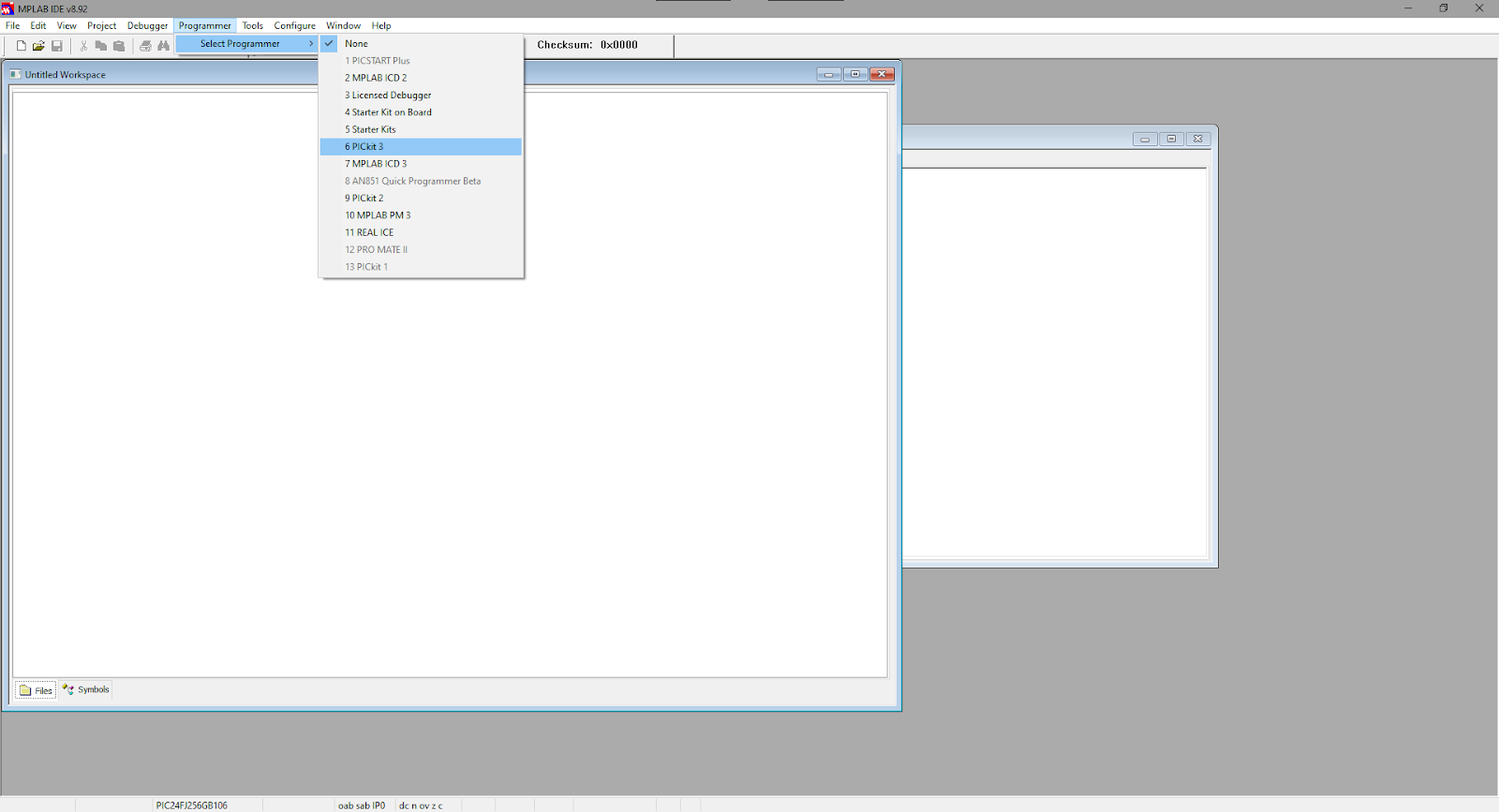
Step #5
Select Pickit 3 under the programmer menu
Step #6
Configure the power setting by going to Programmer>Settings and making sure the check box for Power target circuit from Pickit3 is checked and and the voltage is set to 3.25V (Higher Voltage will damage the robot)

Step #7
Next select the device by going to Device>Select Device and choosing PIC24FJ256GB106

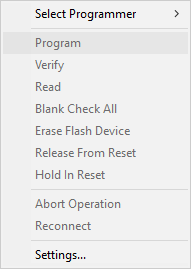
Step #8
Once everything is prepared make sure the robot battery uninstalled, plug in the interface board and program the robot by selecting Programmer>Program